Top Angebote und noch mehr!
FPV Head Tracker – ESP32-C3 Head Tracking System
Dieses Projekt ermöglicht es, die Kopfbewegung via ESP-NOW an einen Empfänger zu senden, der eine Kamera steuert. Minimale Latenz, hohe Präzision durch MPU6050 und kraftvolle MG90S Servos.
Video-Anleitung
Projekt Impressionen
Verwendete Komponenten







Tracker PCB (Grün)
Für das Board mit MPU besser die DIY PCB nutzen, damit alles perfekt in das Gehäuse passt. Bei den Servos ist genug Platz vorhanden.
Auf Amazon kaufen

Kondensator Set
1x 1000µF für Servos (Glättung) sowie 1x 100µF & 1x 1000µF für den Headtracker (ESP32 + MPU).
Auf Amazon kaufen


Anschlüsse & Verkabelung
⚠️ WICHTIG: Die DIY-PCB Layout-Vorgaben müssen exakt eingehalten werden, damit die Bauteile perfekt in das 3D-Druckgehäuse passen!
Sender Unit (Head)
ESP32-C3 Super Mini & MPU6050
MPU SDA -> GPIO 4
MPU SCL -> GPIO 5
MPU VCC -> 3.3V
Reset Taster -> GPIO 9 (GND)
Onboard RGB LED -> GPIO 10 (WS2812B)
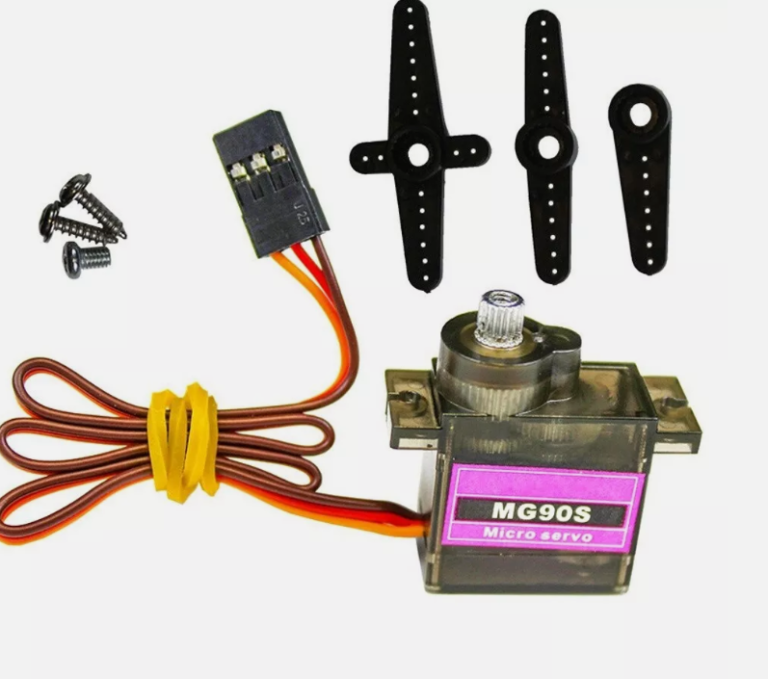
Receiver Unit (Servo)
ESP32-C3 Super Mini & Servos
Yaw Servo -> GPIO 2
Pitch Servo -> GPIO 3
Onboard RGB LED -> GPIO 10 (WS2812B)
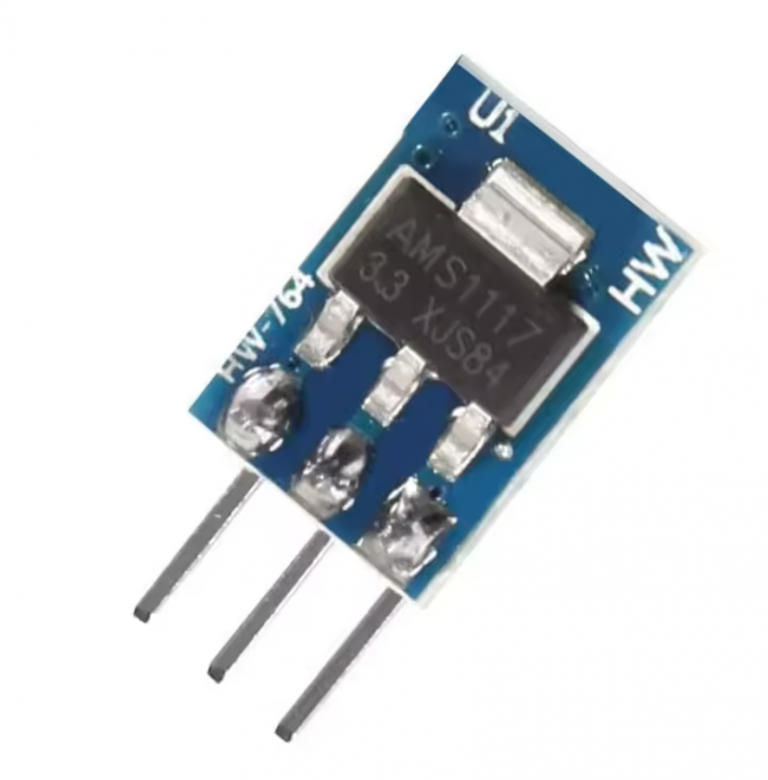
Stromquelle -> 5V (über AMS1117 Regler)
Wie funktioniert der Tracker?
1. Bewegungserfassung (MPU6050):
Der MPU6050 Sensor im Sender-Modul misst Beschleunigung und Drehrate. Das Programm nutzt einen Komplementärfilter (98% Gyro, 2% Accel), um eine extrem stabile Yaw- und Pitch-Position zu errechnen, ohne dass die Werte "wegdriften".
2. ESP-NOW Übertragung:
Statt schwerfälligem WiFi nutzt dieses System das ESP-NOW Protokoll. Dies ermöglicht eine quasi latenzfreie Übertragung der Sensordaten direkt von einem ESP32 zum anderen (Broadcast-Modus).
3. Servo-Glättung (Smoothing):
Der Empfänger nutzt Exponential Smoothing. Das bedeutet, die Servos fahren nicht ruckartig auf die neue Position, sondern gleiten weich dahin, was für ein realistisches Kamerabild sorgt.
4. Status-Feedback (WS2812B):
Die onboard RGB-LED am GPIO 10 zeigt den Verbindungsstatus an: Rot blinkend bei Verbindungssuche und Blau/Grün pulsierend bei aktiver Funkstrecke.
Firmware Online Installieren
🚀 So installierst du meine Codes auf deine Microcontroller:
1. Nutze einen PC mit Google Chrome oder Microsoft Edge.
2. Verbinde den ESP32-C3 per USB-C Kabel mit dem PC.
3. Klicke unten beim entsprechenden Modul (Sender oder Empfänger) auf "CONNECT".
4. Wähle im kleinen Browser-Fenster deinen ESP32 aus und klicke auf "Verbinden".
5. Der Installer erledigt den Rest! Wiederhole das für beide Boards.
1. Nutze einen PC mit Google Chrome oder Microsoft Edge.
2. Verbinde den ESP32-C3 per USB-C Kabel mit dem PC.
3. Klicke unten beim entsprechenden Modul (Sender oder Empfänger) auf "CONNECT".
4. Wähle im kleinen Browser-Fenster deinen ESP32 aus und klicke auf "Verbinden".
5. Der Installer erledigt den Rest! Wiederhole das für beide Boards.
Verbinde dein Modul per USB-C.
SD-Karte einrichten (Wichtig!)
Damit Apps wie Galerie, MP3-Player und die Kamera-Einheit reibungslos funktionieren, benötigt das System bestimmte Ordner auf einer Micro-SD-Karte.
1. SD-Karte formatieren
Die SD-Karte MUSS ZWINGEND im Dateiformat "FAT32" formatiert sein. Nutze dazu das externe Tool:
Offiziellen SD-Formatter laden2. Dateien kopieren
Lade das Start-Paket herunter. Entpacke die ZIP-Datei und kopiere den Inhalt auf die Karte.
📥 Startpaket laden (.zip)Ordnerstruktur (Beispiel):
📁 Music
📁 Photo
📁 Icons
📄 settings.txt
📁 Photo
📁 Icons
📄 settings.txt
Downloads & Links
HD Robotics & Electronics
www.hdrobotics.de







